|
Christopher Bradley I am a postdoc and former graduate student in the Robust Robotics Group at MIT. In general, I'm interested in enabling autonomous robots to act intelligently, particularly in the context of planning hierarchically in the presence of uncertainty. Specifically, I work on developing/learning representations to enable long-horizon decision making for multi-modal robotics problems in partially observable, real-world domains. Before MIT, I studied Mechanical Engineering and Aerospace Engineering at the California Institute of Technology. |

|
Research |
|
Reasoning over Hierarchical Abstractions for Long-Horizon Planning in Robotics
Christopher Bradley PhD Thesis, MIT 2024 Committe: Nicholas Roy, Luca Carlone, George Konidaris, The unifying aim of the work in this thesis is to develop approaches which enable robots to solve complex tasks in large-scale, real-world environments without human intervention. Contributions demonstrate the importance of accounting for imperfection in hierarchical abstraction during planning in various robotics contexts. Paper |
|
Task and Motion Planning in Hierarchical 3D Scene Graphs
Aaron Ray*, Christopher Bradley*, Luca Carlone, ISRR 2024 An approach for task and motion planning in large environments using Hydra Scene Graphs. Paper |
|
|
Learning Feasibility and Cost to Guide TAMP
Christopher Bradley, ISER 2023 Accelerating Task and Motion Planning using learned models of feasibility and cost to guide search. Paper |
|
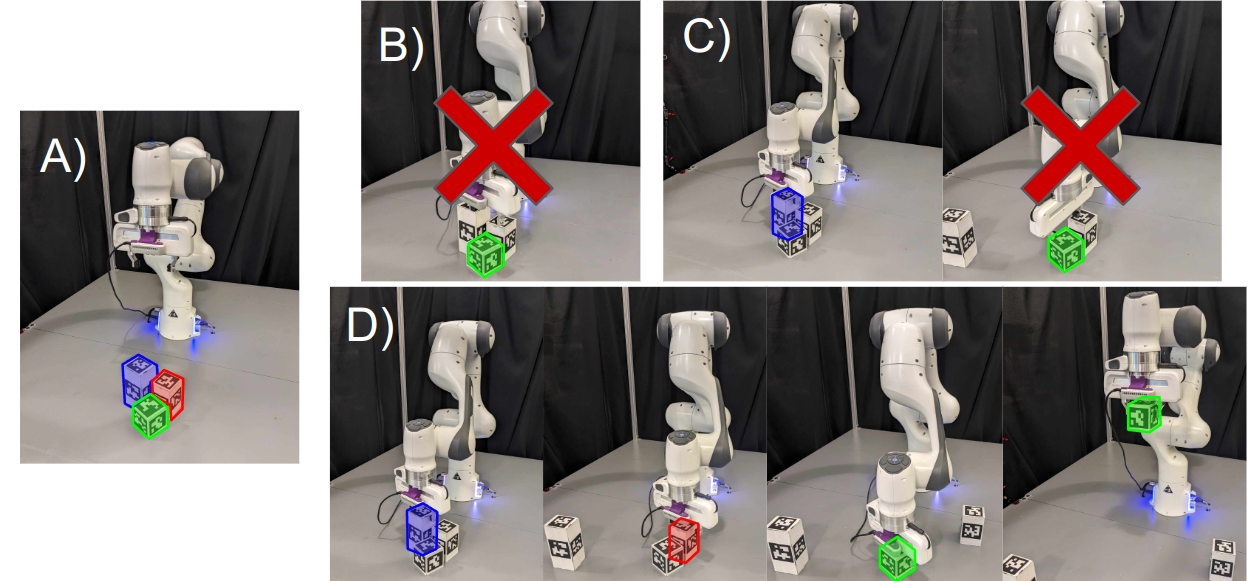
Learning to Guide Search in Long-Horizon Task and Motion Planning
Christopher Bradley, Nicholas Roy CoRL 2022 Workshop on Learning, Perception, and Abstraction for Long-Horizon Planning Using GNNs to learn to guide search within Task and Motion Planning. Paper |
|
|
Learning and Planning for Temporally Extended Tasks in Unknown Environments
Christopher Bradley, Adam Pacheck, Gregory J. Stein, Sebastian Castro, Hadas Kress-Gazit, Nicholas Roy ICRA 2021 Solving complex tasks specified with Linear Temporal Logic in partially explored environments. Paper |
|
|
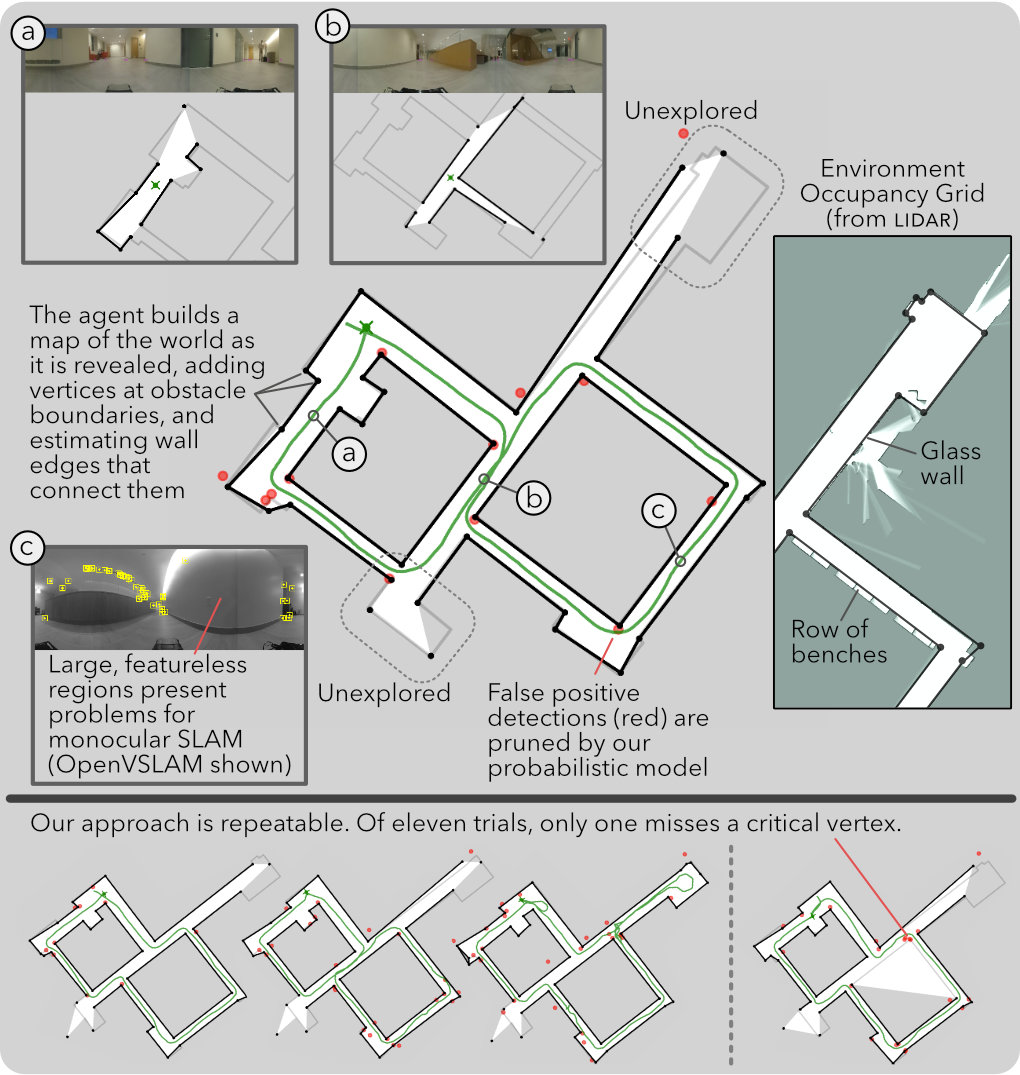
Enabling Topological Planning with Monocular Vision
Gregory J. Stein*, Christopher Bradley*, Victoria Preston*, ICRA 2020 Mapping and in partially explored environments using a learned model to predict topological features from monocular vision. Paper / Talk |
|
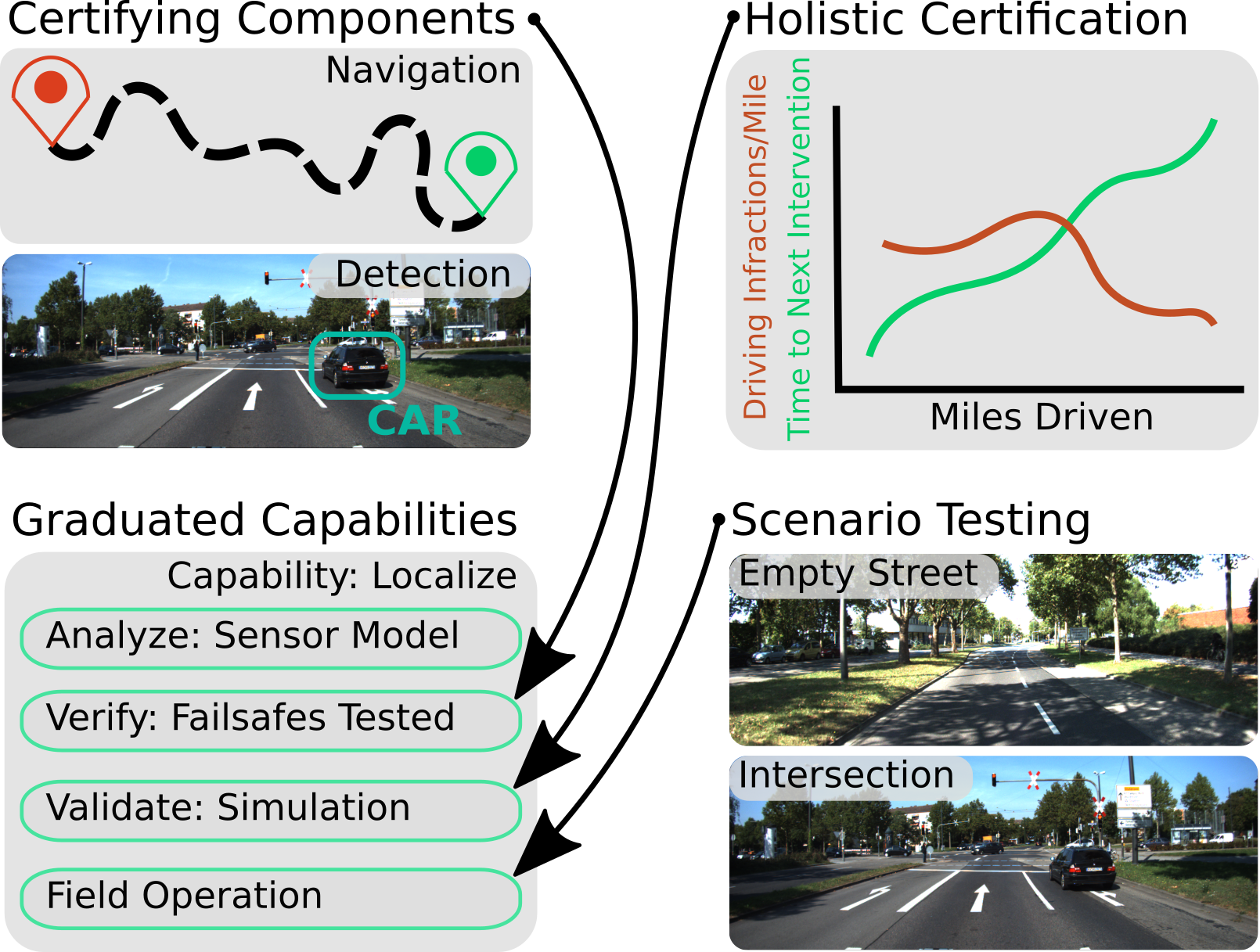
A self driving license: Ensuring autonomous vehicles deliver on the promise of safer roads
Christopher Bradley*, Victoria Preston* MIT Science Policy Review, 2020 Thoughts on the development of regulations for self-driving cars. Paper |
|
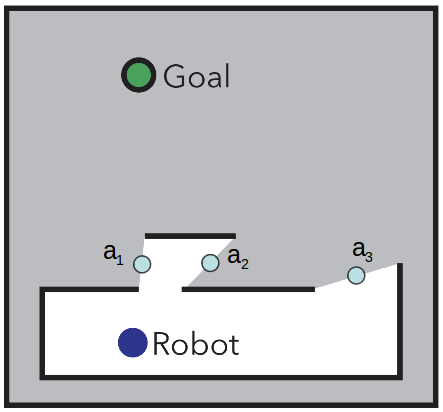
Navigation of Unknown Environments Using High-Level Actions
Christopher Bradley Masters Thesis, MIT 2019 A study of how high-level actions can be used to guide navigation in partially revealed environments. Paper |
|
Learning over Subgoals for Efficient Navigation of Structured, Unknown Environments
Gregory J. Stein*, Christopher Bradley*, CORL 2018 Training simple models to guide navigation in partially revealed environments. Paper |
Miscellanea |
|
Website template from Jon Barron. |